
破解茶园采摘痛点:绝对值编码器赋能采茶机精准高效作业
采茶机器人:茶园里的 “精细活” 需要 “火眼金睛”
在传统茶园中,采茶是一项耗时耗力的精细活 —— 既要准确识别成熟茶叶的位置,又要控制采摘力度避免损伤茶枝,还要保证采摘路径的精准规划,避免重复采摘或遗漏。随着农业智能化的发展,采茶机器人逐渐走进茶园,但要完成这些 “精细活”,离不开核心传感部件的支撑,绝对值编码器就是其中的关键 “功臣”。
采茶机器人的作业场景充满挑战:茶园地形起伏、茶树排列密集、茶叶生长形态不规则,这就要求机器人的关节运动、机械臂定位、行走路径都具备极高的精准度。而绝对值编码器的核心作用,正是为机器人提供 “位置与角度” 的精准反馈,让机器人的每一个动作都 “有据可依”。
绝对值编码器:这些优点让它成为采茶机器人的 “标配”
绝对值编码器是一种能直接输出目标绝对位置信息的传感器,与传统增量式编码器相比,它的核心优点完美匹配采茶机器人的作业需求,具体体现如下:
断电不丢位,重启即精准作业
采茶机器人在茶园作业时,可能会遇到临时断电、移动充电或切换作业区域的情况。
传统增量式编码器需要重新校准原点才能恢复定位,而绝对值编码器无需校准—— 它能实时存储当前的绝对位置信息,即使断电后再次启动,也能立刻获取机器人机械臂、行走轮的准确位置,无需重新调试即可继续采摘。
这一优点避免了重启后重复采摘或遗漏茶叶的问题,大幅提升了作业效率,尤其适合大面积茶园的连续作业。

高精度定位,采摘 “稳、准、狠”

成熟茶叶的采摘精度要求极高:茶芽长度通常仅2-3cm,采摘时需在茶芽基部1-2mm处切断,既不能损伤芽叶,也不能留下过长的茶梗。绝对值编码器的定位精度可达到0.01°甚至更高,能精准反馈机器人机械臂的关节角度、采摘爪的位置,让机器人像人工一样 “瞄准” 成熟茶叶,实现毫米级采摘控制。同时,高精度反馈还能避免机械臂与茶树碰撞,保护设备和茶树。
比如作为国内采茶机器人研发的代表,浙江理工大学研发的第五代智能采茶机器人,将编码器深度融入机械臂关节与行走系统,破解了龙井茶 “一芽一叶” 的精细化采摘难题。
抗干扰能力强,适应复杂茶园环境
高原、多雨地区普遍采用防爆EX、防水IP68型号,
茶园环境复杂,高温高湿、露水雾气、枝叶摩擦等都可能对传感器造成干扰。绝对值编码器采用数字信号传输,IP68还具备防水防尘设计,抗电磁干扰、抗环境干扰能力远优于增量式编码器—— 即使在阴雨天气、枝叶遮挡的情况下,也能稳定输出位置信息,确保机器人不会因信号丢失而出现作业失误。此外,其坚固的结构设计还能承受机械臂运动带来的振动。

实时反馈 + 快速响应,提升作业效率
采茶机器人需要快速识别茶叶、调整机械臂位置、完成采摘动作,这要求传感器能实时反馈位置数据并支持快速响应。绝对值编码器无需累计计数,每一次采样都能直接输出绝对位置,数据更新速度快、延迟低,让机器人的控制系统能及时调整机械臂运动轨迹,减少动作冗余。搭配电机的闭环控制,机器人的采摘节奏可达到每秒 1-2 次,远高于人工采摘效率,同时保证采摘质量的一致性。
不止于采摘:绝对值编码器的全场景赋能
除了核心的采摘动作,绝对值编码器在采茶机器人的其他功能中也发挥着重要作用:
行走定位:
机器人履带驱动轴上安装的机械多圈绝对值编码器,支持多圈测量,解决了丘陵茶园地形中的行走定位问题 —— 即使在坡度 15°的茶地中,编码器也能通过实时反馈履带转动圈数与角度,配合 GPS 实现路径偏差小于5cm的自动修正,当茶园茂密枝叶遮挡 GPS 信号时,编码器可通过累计行程数据维持定位,避免重复采摘或漏采。而当机器人跨区域作业重启后,绝对值编码器的断电记忆功能可快速恢复历史位置信息,无需重新规划路径。。
姿态调整:
安装在机器人机身或机械臂的关节处,感知机身倾斜角度、机械臂姿态,确保在起伏地形上也能保持稳定采摘。


技术赋能,让采茶更智能高效
绝对值编码器以其断电不丢位、无需找零、高精度、抗干扰、快速响应的核心优点,完美解决了采茶机器人在复杂茶园环境下的精准定位与运动控制难题,成为智能采茶设备不可或缺的核心部件。
随着农业智能化的推进,绝对值编码器的应用不仅降低了采茶的人工成本,还提升了茶叶采摘的标准化、规模化水平,为茶叶产业的高质量发展注入了技术动力。

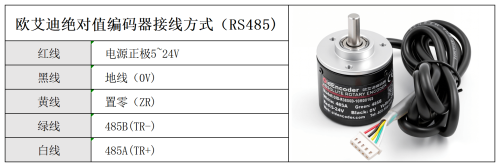
RS485绝对值编码器-STM32驱动代码
电子锚/顶流机与绝对值编码器:海洋精准定位的“黄金搭档”

国产化替代正当时:深圳欧艾迪以精尖编码器技术赋能中国智造

真假多圈绝对值编码器
拉绳位移传感器应用领域:测树木生长——以精准传感赋能生态监测

从无人机到低空交通:绝对值编码器如何助力低空经济?

绝对值编码器应用案例:人影装备——何止 “呼风唤雨”,还能精准 “拿捏” 天气

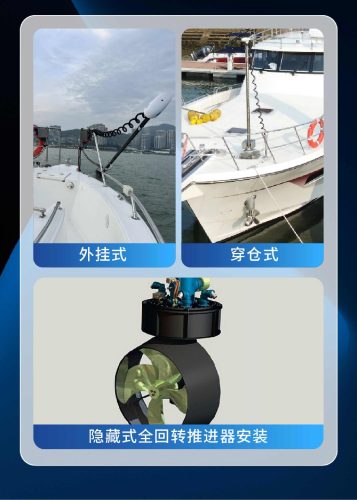
用于船舶和近海应用的编码器和传感器解决方案






